How to Design a Robot? Revision 2
Process
When starting on a new design, it is always good to start with something proven to work with and then improve further. That is the purpose of the Hero Robot.
But how do you proceed beyond that basic design?
Here are some questions and tasks that lead you to improve your robot further.
-
Review what the basic robot can do and what are its weaknesses.
- Identify the tasks your robot should fulfill - Planning -
- What does the robot have to do, breakdown of the various tasks?
- How does the robot interact with the field objects (dispensers, disks)?
- Note the requirements in writing and/or sketches.
- What mechanisms do you need? Are there several options for the same job? Get inspirations elsewhere. Note your ideas in writing and/or sketches.
- Where do you see problems with the designs (feature, reliability, time)?
-
Make a priorized list on how to improve your robot; the improvement in your scoring should help you priorize your changes. Also take into account how long you will need to build and test your prototype, the quicker the better - Priorize your work -
-
Build your prototype / mock-up for that particular feature and test whether your requiremente are fulfilled. If not, do further work.
-
Don’t foget to think about how to integrate your module into the robot. Modify/downscale/upscale if necessary.
- When you have tested your module, add the it to your core robot (the chassis with the wheels or whatever you havw already built before.
Always talk with your teammembers and others, this will help you to get a better solution, and faster!
Below are some links to videos that look at aspects for a robot that can do the VEX IQ Slapshot challenge. Based on the title, ask yourself some questions on what you want to learn and only then start to watch the videos. Make notes and then work on the questions above. Also do your own research with a search engine, search terms like “VEX IQ Slapshot” should give you good results, then focus on videos by clicking on the respective tab.
Videos
Here you find links to some videos I found interesting. In some cases I already added a short summary on what you can see.
What you can do in 1 minute, an example
Some questions guiding your viewing:
- What mechanisms does the robot use to onload the dispenser (3 ways, also think about torque vs. speed)?
- How does the robot shoot the disks into the goal zone?
- How is the foldable arm constructed? How important is the arm for the overall score of the robot?
- How does the robot store the unloaded disks?
- Compare the design of your hero robot with the design of this robot. What are the key differences and how do they affect the scoring?
YouTube: Robot doing the full parcours
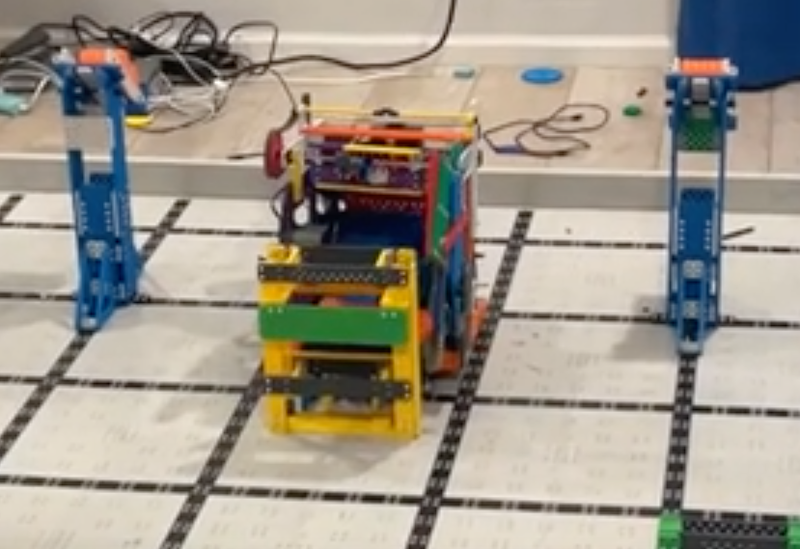
1. Robot running the one minute solo competition, solutions for all tasks of the challenge
One Minute Race shows a robot in action doing the full parcours. The details below give an idea how the robot has been designed to complete the various tasks. The screenshots focus on …
-
the ramp used to collect the disks from the lower unloading dispensers

-
the gear box to unload the purple dispenser
-
unloading the blue and yellow dispensers with a simple arm (but using gears to get sufficient torque)
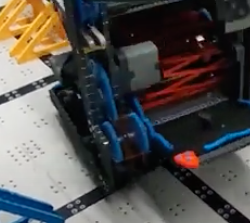
2. Mechanism for unloading the purple dispenser

The YouTube video shows the mechanism in action and gives further information on how to build and use it.
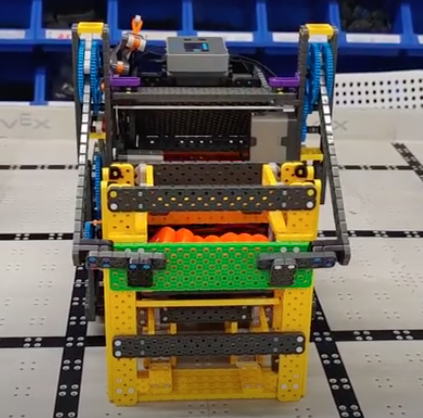
3. Mechanism to unload and collect disks from blue dispenser

The YouTube video shows the construction of th elements lifting the bay of the blue dispenser and then collecting and arranging the disks for shooting.
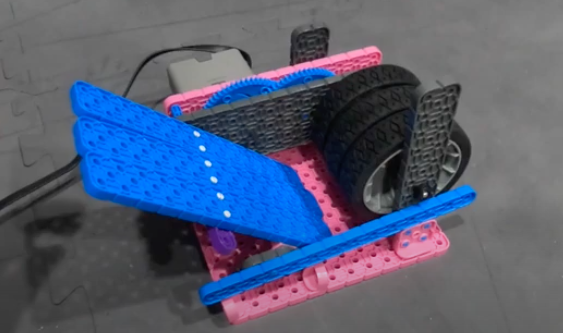
4. Different mechanisms to shoot the disks into the goal zone, small prototypes for quick validation of concepts
This mechanism is easy to build and gives great reach that may need to be reduced.
5. Some interesting concepts are implemented here in this robot

YouTube: VEX IQ slapshot new idea , Taiwan
- Arm to unload blue dispensers
- Use rotating feeder to unload purple dispensers
- Shooting mechanism with fast rotating wheels
6. Intake and shooter integrated
This study of a mechanism uses a harvester type arrangement for collecting disks from the floor and shooting them when reversing the direction.
YouTube: VEX IQ Slapshot Dual Purpose Intake & Shooter Mechanism
7. Detailed look at the foldable arm for the final touch
8. Different arrangements for the shooter wheels
YouTube: Shooter mechanisms, div. rollers
9. How to collect the disks?
This video shows a nice way to arrange the disks in one stack, that makes the feeding of the disks for later shooting easier.
